�l(f��)���r(sh��)�g��2022-05-10���ٷ�����̎��QՓ���g�[��1��
ժ Ҫ�� ժ Ҫ���ھ��ܙC(j��)еʽ�����������켰�z���Ԅ�(d��ng)�����I(y��)�У��C(j��)е�۲���ĩ�˵��O(sh��)Ӌ(j��)��Ҫ���⌦(du��)�x����ɓp�����L(f��ng)�U(xi��n).���]�������ָ��(du��)���|���w�a(ch��n)���Π����m��(y��ng)�����ԣ����� TPU ���Բ����O(sh��)Ӌ(j��)��һ�N����C(j��)еʽ������ץȡ���������Բ���ĩ�ˣ������Ԅ�(d��ng)��(du��)ץȡ�ăx���γ�߅�����j(lu��)���M
����ժ Ҫ���ھ��ܙC(j��)еʽ�����������켰�z���Ԅ�(d��ng)�����I(y��)�У��C(j��)е�۲���ĩ�˵��O(sh��)Ӌ(j��)��Ҫ���⌦(du��)�x����ɓp�����L(f��ng)�U(xi��n).���]�������ָ��(du��)���|���w�a(ch��n)���Π����m��(y��ng)�����ԣ����� TPU ���Բ����O(sh��)Ӌ(j��)��һ�N����C(j��)еʽ������ץȡ���������Բ���ĩ�ˣ������Ԅ�(d��ng)��(du��)ץȡ�ăx���γ�߅�����j(lu��)���M��ץȡ�ɿ��Ե�ͬ�r(sh��)��Ҳ��ͨ�^���ϵ�����׃�ε���ץȡ�^���п��ܮa(ch��n)�����^��ץȡ��.����Ԫ�����ĽY(ji��)��������ʹ�� TPU ���Բ����O(sh��)Ӌ(j��)�����Բ���ĩ���ڽY(ji��)��(g��u)��(y��u)�����܌�(du��)ץȡĿ��(bi��o)���γ���õİ��j(lu��)Ч�����������_(d��)��ץȡҪ����������׃�Εr(sh��)���ܱ����P(gu��n)�I������P(gu��n)��(ji��)���l(f��)������.
�����P(gu��n)�I�~�����Բ���ĩ��;TPU ���Բ���;�C(j��)е�O(sh��)Ӌ(j��);����Ԫ����
�������܃x��������͙z���Ԅ�(d��ng)���x���_���I(y��)�C(j��)е�۵���������������(du��)����ͨ��Ʒ�����܃x���ă�(n��i)���Y(ji��)��(g��u)�ɾ���(x��)���㲿���M�ɣ���O������ʎ���p��.���⣬�Еr(sh��)��횤�ܓpҲ��(hu��)Ӱ���y(c��)������ .���]�����ܙC(j��)е�x���������דp�ԣ��C(j��)е���ڲ����x��r(sh��)��Ҫ���σx���İ�ȫ�������ڂ��y(t��ng)�Ĺ��I(y��)�C(j��)е��ĩ�ˊA�ߴ���鄂����צ���ڲ����^������Ҫ���_���ƊA�ߵ�ץȡλ�ú�ץȡ������t�O�דp���x��.�����ץȡ�����C(j��)е�x�����^���б���p���x������ԓ�ИI(y��)�C(j��)е�۲���ĩ�˵��O(sh��)Ӌ(j��)����Ҫ���c(di��n)���]�Ć��}֮һ.
�����������Բ��ϵ���혲���ĩ�ˌ�(du��)��N������(du��)���F(xi��n)�����õ�ץȡ��������Щ���_ʼ�ڹ��I(y��)��õ��ƏV�͑�(y��ng)��[1].���ڲ��ϵ�����׃�����ԣ����Բ���ĩ�˵���ָ�������m��(y��ng)ץȡ��(du��)������Π��γɰ��j(lu��)��߀�����^���Քn�r(sh��)ͨ�^������׃�����^�ȵ�ץȡ�������o(h��)ץȡ��(du��)���ܓp��.��ˣ��������Բ��ϵ���혙C(j��)е����ᘌ�(du��)�דp���w��ץȡ���������÷�����Ҳ�ɞ�����C(j��)���˲����W(xu��)��һ��(g��)�о����c(di��n).һЩ�о��ˆT������ܛ�w�ֻ����Ԛ��(d��ng)�A�ߑ�(y��ng)�����r(n��ng)�I(y��)���߲�ժ�ϣ�ͨ�^�Y(ji��)��(g��u)��׃�Ό�(sh��)�F(xi��n)�m��(y��ng)���w�Ĺ���[2-3].�ښ��(d��ng)������ָ���A(ch��)�ϣ�߀���о��ߌ����(d��ng)��ָ�Ļ����O(sh��)Ӌ(j��)����{(di��o)���Դ˼Ӵ�A�ߵ��m�÷���[4].�n��(gu��)�W(xu��)�����о������]��ƽ��ץ�� SAC�������Ã�(n��i)��ܛ֧�ΌӺ��ⲿ?j��)ɌӶ���׃����֧�ΌӽY(ji��)��(g��u)��ʹָ�������N�����w[5].һЩ���ڷ����W(xu��)���о��ɹ�Ҳ����(y��ng)�õ����Բ���ĩ�˵��O(sh��)Ӌ(j��)�У�����ɽ��W(xu��)�������������p�@ԭ���O(sh��)Ӌ(j��)�� UHL ܛ�w���(d��ng)ץ�֣���ȫ��ģ�K�����ڊA�߃�(n��i)�������܉�ץȡ�������� 26 ��(40 kg)�����w[6].���⣬߀�н�������F(xi��n)�Ļ�������Ч��(y��ng)(Fin Ray Ef⁃ fect)�����������m��(y��ng)��ָ[7-9]����(sh��)�F(xi��n)�ˌ�(du��)�ߴ��Π� �^ �� �� �� �w �� �� �� ץ ȡ ���� �� Lionel Birglen ����[10-12]�����о�������(sh��)�W(xu��)ģ�ͣ���������(y��u)��ģ�ͅ���(sh��)��ʹ����������l�Y(ji��)��(g��u)���^�õ�׃��Ч��.
����TPU(Thermoplastic polyurethane)�������Ծ۰��������w���z����һ�N����Խ�����W(xu��)���ܵĭh(hu��n)������[13-14]���яV����(y��ng)�����S��a(ch��n)Ʒ�ęC(j��)е�Y(ji��)��(g��u)�У�����܇�������S�С����I(y��)�ܷ�����������߉�ܛ�ܵȣ�������_ʼ����(y��ng)�����O(sh��)Ӌ(j��)���ԙC(j��)��(g��u)[15].���] TPU ���Բ��ϸߏ���������������(qi��ng)�g�����ϻ������ԣ��xȡ������������ָ�����O(sh��)Ӌ(j��)��һ�N����C(j��)еʽ������ץȡ���������Բ���ĩ��.������ Solid⁃ Works ����ɲ���ĩ�˂���(d��ng)�Y(ji��)��(g��u)��������ָ�Ľ�ģ��Ȼ��ͨ�^�O(sh��)Ӌ(j��)�����䃞(y��u)��������ָ�ĽY(ji��)��(g��u)�O(sh��)Ӌ(j��)�����ͨ�^����Ԫ�����(y��n)�C TPU ���Բ��ό�(du��)�O(sh��)Ӌ(j��)�����Բ���ĩ���ڽY(ji��)��(g��u)�����ϵ��m����.
����1 ���}�O(sh��)��
������(y��ng)�� TPU ���Բ��ϣ��O(sh��)Ӌ(j��)һ�N�����ܙC(j��)еʽ������ץȡ���������Բ���ĩ��.��Ŀǰ�ĉ��������a(ch��n)��У�(y��n)�^���У���õęC(j��)еʽ��������̖(h��o)�� Y50��Y60��Y100 �� Y150.�O(sh��)Ӌ(j��)�����m��(y��ng)�A��ּ�������m��(y��ng)�؊Aȡ��N������̖(h��o)�ęC(j��)еʽ�������������䷀(w��n)��̧�����õ�ָ��λ��.�Y(ji��)�ό�(sh��)�H���a(ch��n)�����֪�����Aȡ�Ĺ�����ֱ����С�� 50~150 mm ���ȵĈA���w���ҹ������������^ 1 kg������O(sh��)Ӌ(j��)�����Բ���ĩ�˵�ץȡĿ��(bi��o)���ֱ���O(sh��)���� 150 mm.���⣬����ʹ�O(sh��)Ӌ(j��)�����Բ���ĩ�ˌ�(du��)ץȡ���w�_(d��)����ѵİ��j(lu��)Ч�����茦(du��)��ָ�Y(ji��)��(g��u)����(y��u)���O(sh��)Ӌ(j��).��(y��u)���O(sh��)Ӌ(j��)�Y(ji��)�����u(p��ng)�r(ji��)�ж�N��ʽ�����о�?j��)H���]���ϵİ��j(lu��)Ч��.������ָ���j(lu��)���w��(du��)���w��Ҫ��s�����õ�����ָ��픶˲��֣�����O(sh��)����(y��u)���Y(ji��)�����u(p��ng)�r(ji��)��ʽ����ָ׃�͕r(sh��)����c(di��n)�ڙM�����λ�ƞ��������ԓ��(y��u)���Y(ji��)��(g��u)����(sh��)����ȡ��ʽ����� SolidWorks ��(y��u)���O(sh��)Ӌ(j��)�����估�M�㹤��Ҫ��ĴֲڽY(ji��)������(d��ng)ǰ�O(sh��)Ӌ(j��)�H�P(gu��n)ע���Բ���ĩ�˽Y(ji��)��(g��u)���ܵČ�(sh��)�F(xi��n)������������ָ�Y(ji��)��(g��u)�_(d��)�����׃�����r(sh��)�Ƿl(f��)������.
����2 ���w�Y(ji��)��(g��u)�O(sh��)Ӌ(j��)
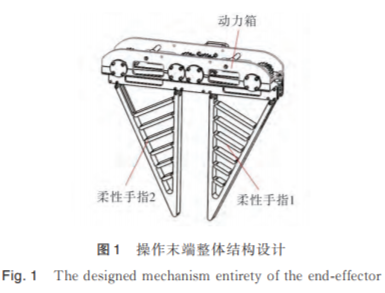
�����O(sh��)Ӌ(j��)������ĩ�˲���ĩ���� SolidWorks �е�ģ����D 1 ��ʾ.�C(j��)е�ֲ���ĩ�˰�����(d��ng)����̓ɂ�(g��)������ָ.�ɂ�(g��)������ָ�ڄ�(d��ng)����ă�(n��i)������(d��ng)�C(j��)��(g��u) �� �(q��) ʹ �� ���� �� �M �� �� ��(d��ng) �� �� �� �_ �� �� �n �Ą�(d��ng)��.
����2. 1 ������ָ���O(sh��)Ӌ(j��)
����������ָ���O(sh��)Ӌ(j��)��D 2 ��ʾ.ÿ��(g��)��ָ�������l�ķ����Y(ji��)��(g��u)����Ҫ��ܞ� V �����Կ�ܣ����߅����һ���B�ӗU�����B�ӗU���c V �ο�ܵă�߅ͨ�^�����q��B��.
����������ָ��ԭ����D 3 ��ʾ.������ʹ�����ԏ����w���ϵ�һ�w������B�U�C(j��)��(g��u)����������Ч��(y��ng)���� V ��߅���(c��)�ܵ��D���r(sh��)ԓ�Y(ji��)��(g��u)�ܮa(ch��n)������[10]����˻���ԓ�Y(ji��)��(g��u)�O(sh��)Ӌ(j��)��������ָ��ץȡ�A�x��r(sh��)��ͨ�^���m��(y��ng)׃�Ό�(du��)�x���γ���߅�����j(lu��).���� V ��߅���g�B�ӗU���������q朵ď�������(hu��)��ʹ����׃�κ����ָ�Y(ji��)��(g��u)�֏�(f��)ԭ�����Π�����ָ��ԓ�؏�(f��)����������(du��)ץȡ��(du��)��a(ch��n)��һ�����ȵĊA��Ч��.��(d��ng) V ��߅���(c��)�ĔD������ʧ�r(sh��)����ָ�Y(ji��)��(g��u)�t�������q朵ď����������£��֏�(f��)ԭ�����Π�.
����2. 2 ����(d��ng)�C(j��)��(g��u)���O(sh��)Ӌ(j��)
��������ĩ�˄�(d��ng)����ă�(n��i)������(d��ng)�C(j��)��(g��u)��D 4 ��ʾ����ԭ��D��D 5 ��ʾ.ԓ����(d��ng)�C(j��)��(g��u)��Ҫ�����X݆�X�l��늙C(j��)���D(zhu��n)��(d��ng)�D(zhu��n)������ָ�ڙM�����ƽ�ƣ��c늙C(j��)ݔ���S���B������(d��ng)�(q��)��(d��ng)�X݆ 1 ����(d��ng)����(d��ng)ͬ����݆ 1 �D(zhu��n)��(d��ng)����(d��ng)��ͨ�^ͬ���� 1 �����Ą�(d��ng)ͬ����݆ 1��Ȼ��(d��ng)�Ą�(d��ng)�(q��)��(d��ng)�X݆ 1 �D(zhu��n)��(d��ng).�Ą�(d��ng)�(q��)��(d��ng)�X݆ 1 �c�X�l 1 ���ϣ�����(d��ng)�X�l 1 �ڙM����ƽ�ƣ�������(d��ng)�˹��B���X�l 1 ��������ָ 1 �ęM���Ƅ�(d��ng).���ڊA�ߵď��_���]�������������\(y��n)��(d��ng)������x��һ��(g��)�c����(d��ng)�(q��)��(d��ng)�X݆����(d��ng)�Ȟ� 1 ���X݆������ٷ������(d��ng)������(d��ng)�(q��)��(d��ng)�X݆ 2������(d��ng)������ָ 2 �Ă���(d��ng)�C(j��)��(g��u)��ʹ֮�c������ָ 1 �Ă���(d��ng)�C(j��)��(g��u)��ͬ�������\(y��n)��(d��ng)���Ķ���(sh��)�F(xi��n)���Բ���ĩ�˵�ƽ�ЊAȡ��(d��ng)��.
����ƽ�ЊAȡ�r(sh��)���ɊA�ߵ��г��迼�]�Aȡ�����ijߴ��С.��(d��ng)�A�ߏ��_�r(sh��)�����Aȡ�Ĺ�����(y��ng)�܉������M(j��n)��A�ߵĹ������g����˃ɊA�ߵ�����г̑�(y��ng)���^���Aȡ���������ߴ�.��(d��ng)�A���]�ϕr(sh��)�����]���A�ߵ���׃����������Ч�����ɊA�ߵ���С�г̑�(y��ng)С�����Aȡ��������С�ߴ�.�C���������X�lֱ���Ƅ�(d��ng)���г̷������� 30~180 mm.
�������˱��Cֱ���\(y��n)��(d��ng)��ƽ��(w��n)�ԣ�����ĩ�˵Ă���(d��ng)�b���O(sh��)Ӌ(j��)��߀ʹ���˻�܉����ֱ����(d��o)��Y(ji��)��(g��u)����D 6 ��ʾ.�X�l�Ă�(c��)��㊳�һ�l�ی��͌�(d��o)܉������ͬ�IJۣ����ڲ����_ͨ�ף����X�l�c��܉���B�������òی��X�l�c��(d��o)܉��λ.ͨ�^��(d��o)܉��֧�л����ϵĻ��ƣ���(sh��)�F(xi��n)�X�l�ڲ���ĩ�˙M�����ϵČ�(d��o)��ƽ���Ƅ�(d��ng).
����3 �� �� �� ָ �� ��(y��u) �� �O(sh��) Ӌ(j��) �� �� �� Ԫ����
����ʹ�� TPU ���Բ����O(sh��)Ӌ(j��)���Բ���ĩ�˵���ָ�����w�x�õĞ�Ӳ�Ȟ� 60HA �� TPU����Ԕ��(x��)����(sh��)���ڱ� 1.
��������ʹ������ָ��ץȡ���w���^���Ќ�(du��)���w�γɵİ��j(lu��)Ч���(y��u)������ʹ��׃�ε��^���нY(ji��)��(g��u)���ϲ��l(f��)�����ѣ���Ҫ��(du��)��ָ���Π���һ���ă�(y��u)�� .��(y��u)���O(sh��)Ӌ(j��)������Ҫ���]����ץȡ���w�ܷ��γ���ѵİ��j(lu��)Ч�����������������ָ��c(di��n)�� x �����ϵ�����(du��)λ�ƣ���Y(ji��)��ֵ����Խ���j(lu��)Ч��Խ��.����ԓ���}�漰��׃���^�࣬���о���(du��)������ָ�ĽY(ji��)��(g��u)��(y��u)���O(sh��)Ӌ(j��)��Ҫ�ڹ̶��� V �ο�����M(j��n)�У��H��(y��u)�� V ��߅���B�ӗU���cǰ�����ĊA�Dž���(sh��) θ.�C�Ͽ��]ץȡĿ��(bi��o)�x�������ߴ缰�O(sh��)Ӌ(j��)�^���Ђ���(d��ng)�C(j��)��(g��u)���г̾��x��������ָ�� V �ο����K�_���ijߴ��ǰ�����L(zh��ng) 233. 90 mm��������L(zh��ng) 259. 35 mm��ǰ�����c������ĊA�Ǟ� 25. 95 °.
����3. 1 ������ָ�Y(ji��)��(g��u)��(y��u)��
������ǰ���l���£���(du��) V ��߅���B�ӗU���cǰ�����ĊA�Dž���(sh��) θ ����(y��u)����ʹ��ָ׃�Εr(sh��)��ָ���� x �����λ�����������ԓ���}��(ji��n)����O��ץȡ�l���µă�(y��u)�����}.��ץȡ���Ŀ��(bi��o)���w Y150 ��̖(h��o)�ęC(j��)еʽ������(ֱ�� 150 mm���ؼs 1 kg)�r(sh��)������ָ��׃����r�����(zh��n)����(d��ng)������ָ��ץȡԓ���w�r(sh��)�_(d��)���(y��u)����׃�ΰ��j(lu��)Ч���������J(r��n)��ԓ��(y��u)���Y(ji��)�����m���������ߴ�ĉ������IJ����龰��ץȡ�r(sh��)�Ľ��|�c(di��n)�O(sh��)����ǰ���������c(di��n).
�������P(gu��n)֪�R(sh��)���]�������о��c��(y��ng)���ڿ��l(f��)�ׂ�(g��)����
�������˫@�ØO��ץȡ�l������ָ��׃�νY(ji��)������Ҫ�_���_(d��)��ԓ׃������ָ����ؓ(f��)�d.��̎����ָ��ץȡ�����w�r(sh��)��׃�ε���r�酢��(�D 7)����ȡԓ��ָ����ؓ(f��)�d�Ĺ�Ӌ(j��)ֵ.�ĈD 7 ��Ҋ����ָ�Aȡ��������r(sh��)����ֻ��ָ��(du��)��������Ħ���� Ff1�� Ff2�c������������ G ƽ�⣬�� FN1�� FN2�鉺���팦(du��)��ֻ��ָ�ĉ���ؓ(f��)�d���O(sh��)��ָ�c�������⚤��Ħ��ϵ��(sh��)�� μ���t �� �� �� G = Ff1 + Ff2 = μF N1 + μF N2���� �����z�c�T�F(�횤����)֮�g��Ħ��ϵ��(sh��) μ = 0.8.��(d��ng) �� �� �� �� �� g=9. 8 �r(sh��) ��Ӌ(j��) �� �� F N1 = F N2 = 6.125 N.�� SolidWorks �ă�(y��u)������������ԓ����ֵ��(du��)������ָǰ���������c(di��n)ʩ��ؓ(f��)�d���� 45~85 °�ą^(q��)�g��(n��i)�� 1 °�鲽�L(zh��ng)��׃ V ��߅���B�ӗU���cǰ�����ĊA�Dž���(sh��) θ��Ӌ(j��)�㌦(du��)��(y��ng)��ָ���� x �����ϵ�λ�ƣ��õ��ĽY(ji��)����D 8 ��ʾ.�ĈD 8 ��Ҋ����(d��ng) V ��߅���B�ӗU���cǰ�����ĊA�Dž���(sh��) θ �� 56 °�r(sh��)��ָ���� x �� �� �� �� λ �� �_(d��) �� �� �� �� �� ֵ ���s �� �� �� λ �� 0. 68 mm������ԓ�A�Ǘl���£�������ָ�܌�(du��)ץȡ���w�γ���õİ��j(lu��)Ч��.
�����D 9 ����ָ��ԓؓ(f��)�d�µ�׃����r.�ĈD 9 ��Ҋ����ԓؓ(f��)�d��׃�κ����ָ�P(gu��n)��(ji��)̎���B�ӗU��֮�g���l(f��)�����棬�����ă�(n��i)��(y��ng)��ֻ�� 1. 255 MPa���l(f��)����ǰ�����c���Ă�(g��)�B�ӗU�����B��̎������ԓ�Ƕȅ���(sh��)�Ƿ��ϲ��Ϲ��ܺ��O(sh��)Ӌ(j��)Ҫ���.�����ڌ�(sh��)�Hץȡ�У���ָ�İ��j(lu��)���Õ�(hu��)��(du��)ץȡ��a(ch��n)��һ��(g��)����֧�ֵķ�������ˌ�(sh��)�H��Ҫ��ץȡĦ������(hu��)�ȴ�̎��Ӌ(j��)��ֵС������(du��)����ָ�Č�(sh��)�H����ؓ(f��)�dҲ��(hu��)�ȹ�Ӌ(j��)ֵС����̎�Թ�Ӌ(j��)ֵ����ݔ��õ�����ָ׃�Ε�(hu��)�Ȍ�(sh��)�H�Ĵ�.��ʹ��ˣ�����ԓ��Ӌ(j��)����ؓ(f��)�d����(hu��)���������ָ�^��׃�Σ�����(j��)�O(sh��)����Ŀ��(bi��o)���}����Ȼ�����J(r��n)��ԓ�Ƕ�ֵ���B�ӗU���c��ָǰ�������(y��u)�Ƕȅ���(sh��).
����3. 2 ������ָ�Y(ji��)��(g��u)������Ԫ����
�����������m��(y��ng)�A��ץȡ������r(sh��)������׃������ڲ��ϵ��S�ɷ�����(n��i)����ˌ�(du��)������ָ�ă�(y��u)���Y(ji��)��(g��u)�����׃���o���W(xu��)���棬���Д��xȡ���ϵĺ�����.
�������ȴ_��������ָ��Փ�Ͽ����_(d��)�������׃�Σ����A������С�г̕r(sh��)��ȫ�A��ס���Ŀ��(bi��o)��̖(h��o)�ĉ���������(du��)�횤�γ���ȫ���j(lu��)����r�µ�׃�� . Y150 ��̖(h��o)�ĉ������횤�⏽�� 150 mm���O(sh��)��ֱ���\(y��n)��(d��ng)�г̞� 30~180 mm.��(d��ng)�O(sh��)��̎����С�г̵� 30 mm ̎�r(sh��)����ָ�_(d��)�����׃�Σ�ǰ���������c(di��n)��ˮƽ�����Ϯa(ch��n)�� 60 mm ��λ��.
�����D 10 ��ʾ��������������ָ���o���W(xu��)����Y(ji��)�����D����ָ��ǰ����ˮƽ�����ܵ���������̎�ژO��׃�Π�B(t��i).�ĈD 10 ��Ҋ���O��׃�������(y��ng)�����F(xi��n)���B�ӗU���c�ڶ���(ji��)��������B��̎����(sh��)ֵ�� 2. 093 MPa�������O(sh��)Ӌ(j��)�r(sh��)�x�õ� TPU ���ϵ������O�� 9. 237 MPa.��ˣ��� TPU ���Բ����O(sh��)Ӌ(j��)��������ָ�ژO��׃�Π�B(t��i)�����ܱ�������ʹ�ù��ܣ�����(hu��)�a(ch��n)�����ѬF(xi��n)��.
����4 �Y(ji��) Փ
���������ھ��ܙC(j��)еʽ��������ץȡ�����б��o(h��)�x�����ܓp������ TPU ���Բ����O(sh��)Ӌ(j��)��һ�N���Բ���ĩ�ˣ���ͨ�^���m��(y��ng)����׃�Ό�(du��)ץȡ�ăx���γ�߅�����j(lu��)���M��ץȡ�ɿ��Ե�ͬ�r(sh��)����ܛ�� TPU ����Ҳ�ܱ���p���x����߀��ͨ�^����׃������ץȡ�^���п��ܮa(ch��n)�����^��ץȡ��.����Ԫ�����ĽY(ji��)��������ʹ�� TPU ���Բ����O(sh��)Ӌ(j��)����혲���ĩ���ڽY(ji��)��(g��u)��(y��u)�����܌�(du��)ץȡĿ��(bi��o)���γ���õİ��j(lu��)Ч�����������_(d��)��ץȡҪ����������׃�Εr(sh��)����Ȼ�ܱ����P(gu��n)�I������P(gu��n)��(ji��)���l(f��)������.——Փ�����ߣ����L(zh��ng)�� 1,2,�����w 3*,�X־�� 4 ,������ 2 ,�� �� 1
���������īI(xi��n)��
����[1] ꐼҘ� . ���I(y��)�C(j��)��������?sh��)A�ߌ�(sh��)�H��(y��ng)���cչ��[J]. �������̼��g(sh��)�c�O(sh��)Ӌ(j��)��2017(8)��3087-3092.
����[2] ���G�����¸ң���P(y��ng)���� . ܛ�w�C(j��)е��צ�ڹ��߲�ժ�еđ�(y��ng)���о��M(j��n)չ[J]. �r(n��ng)�I(y��)�����W(xu��)��(b��o)��2018��34(9)��11-20.
����[3] ����������ѣ�� . �r(n��ng)�I(y��)��ժ�C(j��)�������ԙC(j��)е���о�[J].�Ї�(gu��)�r(n��ng)�C(j��)���W(xu��)��(b��o)��2019��40(3)��173-178.
����[4] ��ɽ�ƌW(xu��)���g(sh��)�W(xu��)Ժ . һ�N���(d��ng)���Զ�ָ׃�͙C(j��)е�Aצ���Ї�(gu��)��CN201921377385.8[P]. 2020-06-09.
����[5] LEE J Y��SEO Y S��PARK C��et al. Shape-adaptive universal soft parallel gripper for delicate grasping using a stiffness-variable composite structure [J]. IEEE Transactions on Industrial Electronics��2020��68(12)�� 12441-12451.
����[6] LI H��YAO J��WEI C��et al. An untethered soft robotic gripper with high payload-to-weight ratio [J]. Mechanism and Machine Theory��2021��158��104226.
����[7] HOSALE M D��KIEVID C. Modulating territories�� penetrating boundaries[J]. Footprint��2010(6)��55-68
����[8] ������Sչ��������� . ��������Ч��(y��ng)��һ�N���m��(y��ng)�C(j��)е��צ�O(sh��)Ӌ(j��)[J].���K�Ƽ���Ϣ��2020��37(26)��49-55.
����[9] SHAN Xiaowei��BIRGLEN L. Modeling and analysis of soft robotic fingers using the fin ray effect[J]. The International Journal of Robotics Research��2020��39 (14)��1686-1705.
����[10] PFAFF O�� SIMEONOV S�� CIROVIC I�� et al. Application of fin ray effect approach for production process automation [M]. Vienna�� DAAAM International��2011��1247-1249.
����[11] BIRGLEN L. Enhancing versatility and safety of industrial grippers with adaptive robotic fingers[C]. Hamburg��IROS��2015��2911-2916.
����[12] BIRGLEN L. Type synthesis of linkage-driven selfadaptive fingers [J]. Journal of Mechanisms and Robotics��2009(2)��1-9.
����[13] �x�࣬���L(zh��ng)�����Z���� . ���Ը����w�S����(qi��ng)��;��� ��(f��) �� �� �� �� �� �� �c �� ��[J]. �� �� �� �� �c ��(y��ng) �� �� 2010��4(4)��765-770.
����[14] �ǽ��ɣ����L(zh��ng)������һ�P���� . �h(hu��n)����֬����ģ���z�� �Y(ji��) ��(g��u) �c �� ��[J]. �� �� �� �� �c ��(y��ng) �� ��2010��4(4)�� 693-698.
����[15] GANDARIAS J M��GÓMEZ-DE-GABRIEL J M�� GARCÍA-CEREZO A J. Enhancing perception with tactile object recognition in adaptive grippers for humanrobot interaction[J]. Sensors��2018��18(3)��692.